Como o objetivo é criar uma plataforma genérica para pesquisas, a equipe usou apenas materiais de fácil aquisição e de baixo custo na construção do robô. [Imagem: EPFL]
Biomecânica
Apesar de terem batizado sua criação de 'robô-guepardo', Alexander Sprowitz e seus colegas explicam que este é um biorrobô inspirado nos movimentos e na fisiologia de um gato doméstico.
Segundo eles, o objetivo do trabalho é criar uma plataforma genérica que encoraje a pesquisa em biomecânica, particularmente no projeto de pernas biônicas e próteses robóticas.
Como o cérebro dos robôs cabe em um chip, robôs biomecânicos podem dispensar a cabeça - na verdade, o gato robótico não é autônomo, movendo-se conectado por meio de fios ao computador que controla seus movimentos.
Apesar disso, mesmo não sendo ágil como um gato de verdade - falta-lhe não apenas a cabeça, mas também o 'rabo ativo', essenciais para o equilíbrio e o andar elegante dos gatos - o robô é estável e move-se rápido, gastando menos de um segundo para percorrer uma distância equivalente ao comprimento do seu corpo.
Como o objetivo é criar uma plataforma genérica para pesquisas, a equipe da Escola Politécnica Federal de Lausanne, na Suíça, usou apenas materiais de fácil aquisição e de baixo custo na construção do robô.
Pernas de gato
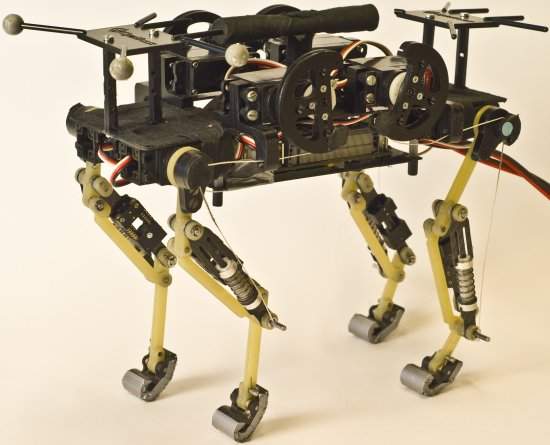
Segundo Sprowitz, o grande avanço tecnológico do robô está no projeto de suas pernas, baseado na observação meticulosa e na reprodução da perna do gato doméstico - o número de segmentos, três em cada perna, e suas proporções, são as mesmas das pernas de um gato.
Foram usadas molas para fazer as vezes dos tendões, enquanto pequenos motores desempenham o papel de músculos.